
The ReWeave project develops a robotic system to transform construction and demolition waste into functional walls, fostering human-robot collaboration. We scanned broken tiles to optimise their arrangement and shifted from brittle clay to reliable geopolymer for binding. By adopting a Human-Robot Collaborative approach, we integrate automation with human oversight for efficient construction outcomes. The ReWeave project is nominated for the 2025 EUmies awards in the Young Talent category by the Institute for Advanced Architecture of Catalonia, and was also self nominated for Prototypes for Humanity 2024.
Objectives
-
Efficiently recycling and repurposing materials that would otherwise contribute to landfill overflow.
Promote a Circular economy
-
Where robots and humans work in tandem
Robots handling repetitive and precise tasks while humans make real-time creative and critical decisions.
-
A scalable and replicable system
Influencing policies and building codes to support sustainable practices.
-
Leverage the randomness of recycled materials and the intentionality of parametric design to produce unique, customized wall structures.
transforming waste into architectural art.
Given the context and purpose, our workflow involves acquiring materials from building demolition sites. Among various waste types, we specifically target planar cementitious waste in this study. Upon sourcing the materials, they go through sorting and segregation based on criteria such as shape, color, or size. In this study, these tasks are outsourced to a third party.
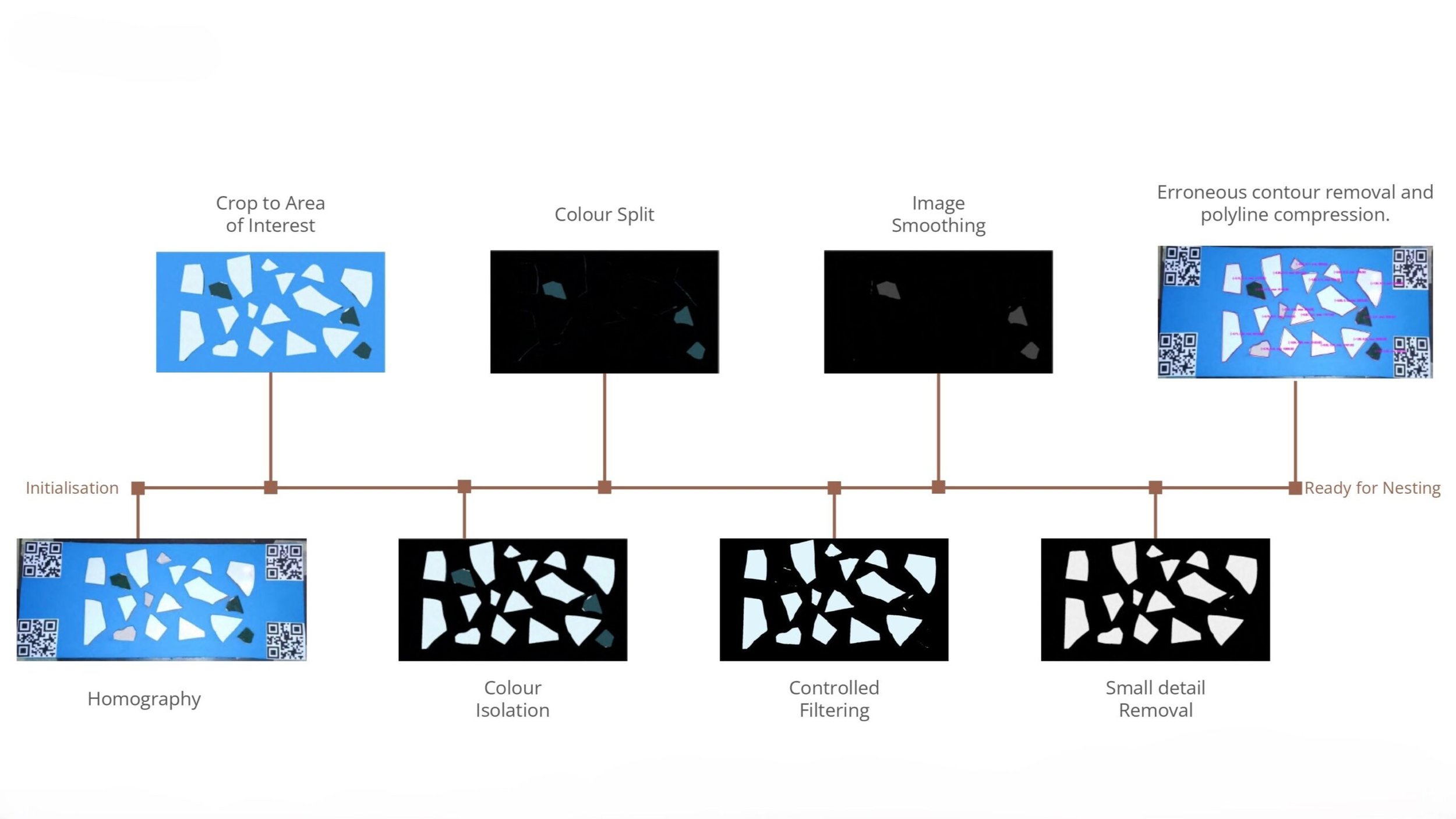
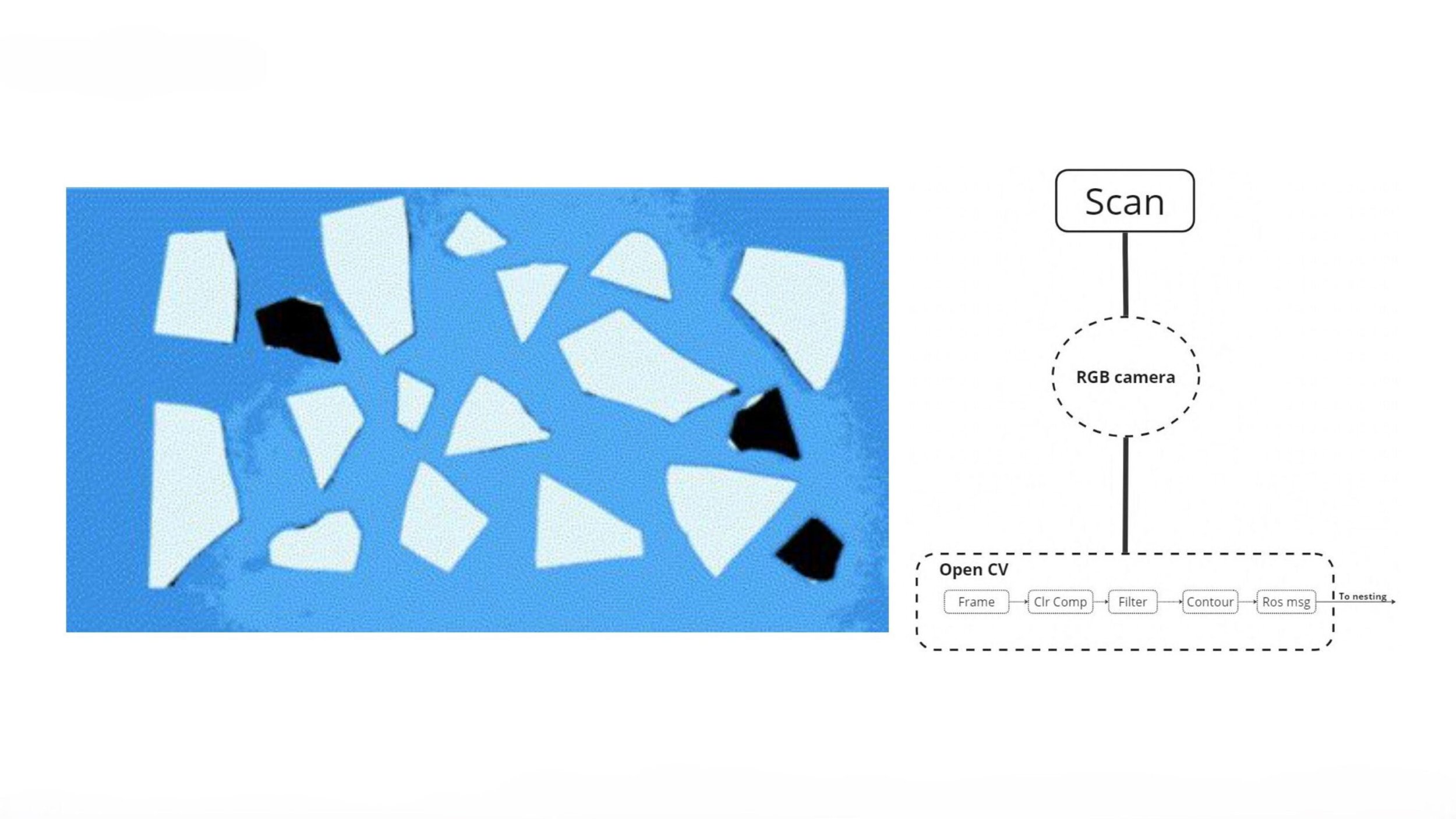
The primary process of the ReWeave system begins with scanning the C&D wastes to extract polylines for nesting using a Packing algorithm. This is done within custom parametrically controlled shapes to generate iterations aligning with desired design parameters.
Once the design and nested patterns are confirmed, the wall will be fabricated robotically using pick n place methods and then binder will be applied to strengthen it.

WORKFLOW
Manual Prototyping
After careful consideration of all these State-of-the-art references, we conducted some manual experiments to understand the logic and patterns of behaviour. Experiments with Geopolymer as a binder gave a clear understanding of the work-ability and behaviour.
After Geopolymer experiments, numerous explorations of tile stacking based on various logic were tested. Out of these some of them were notable with remarkable observations.


Scanning and Nesting
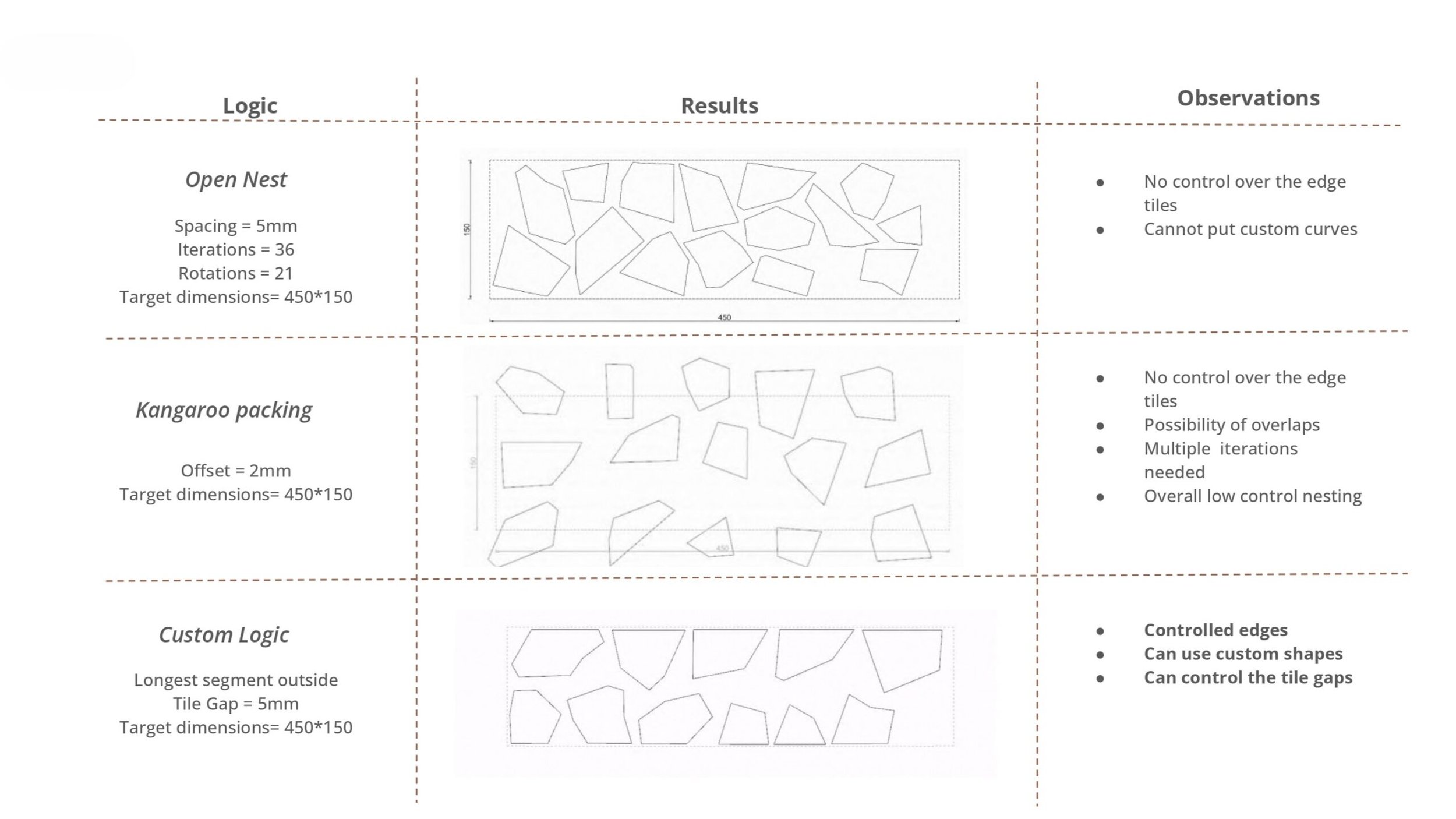
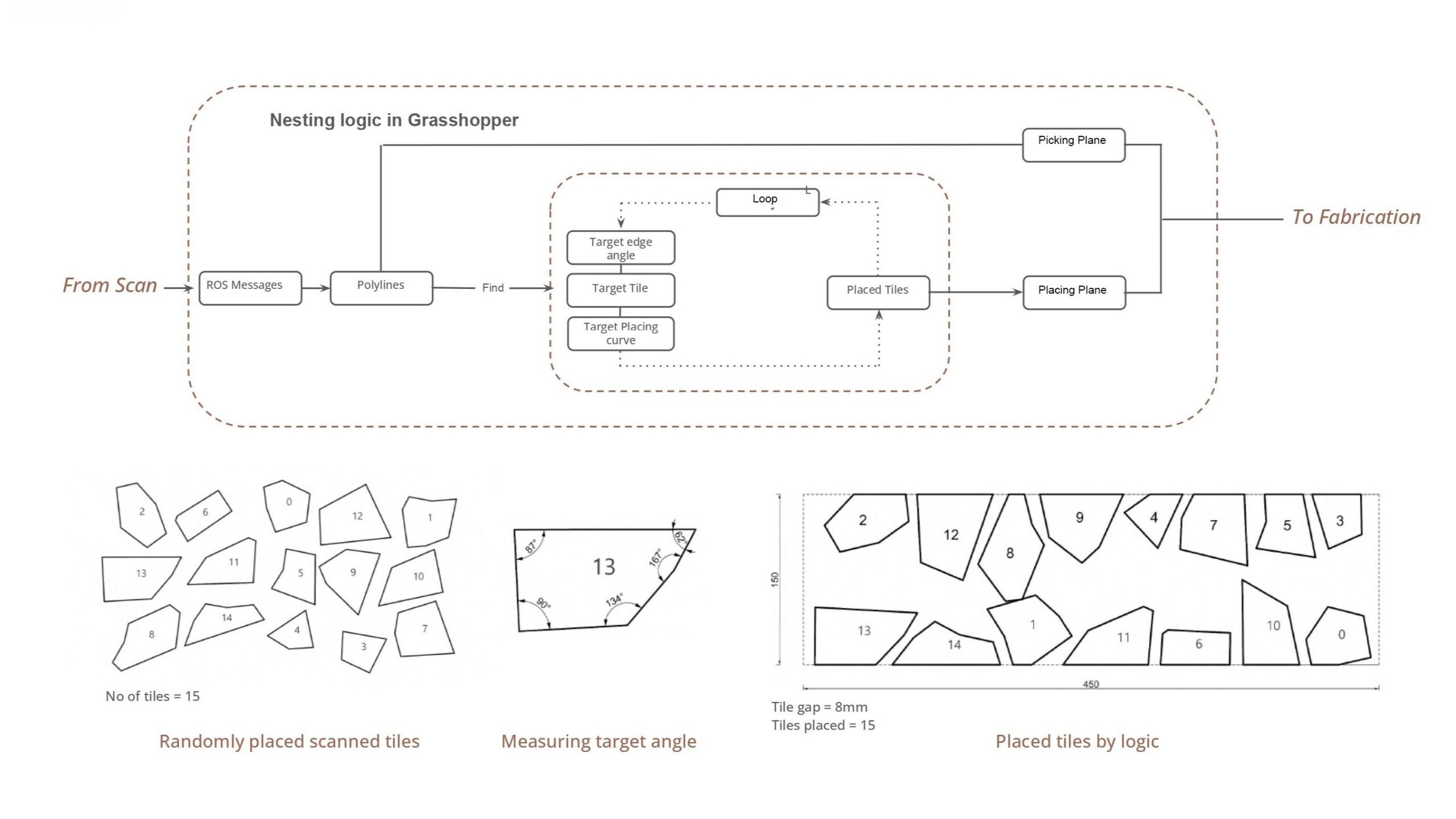
Nesting Logics
Toolpath Generation
Depth Analysis and Projection Mapping
Human – Robot Collaboration

System Architecture
Main Data Node – Error Log
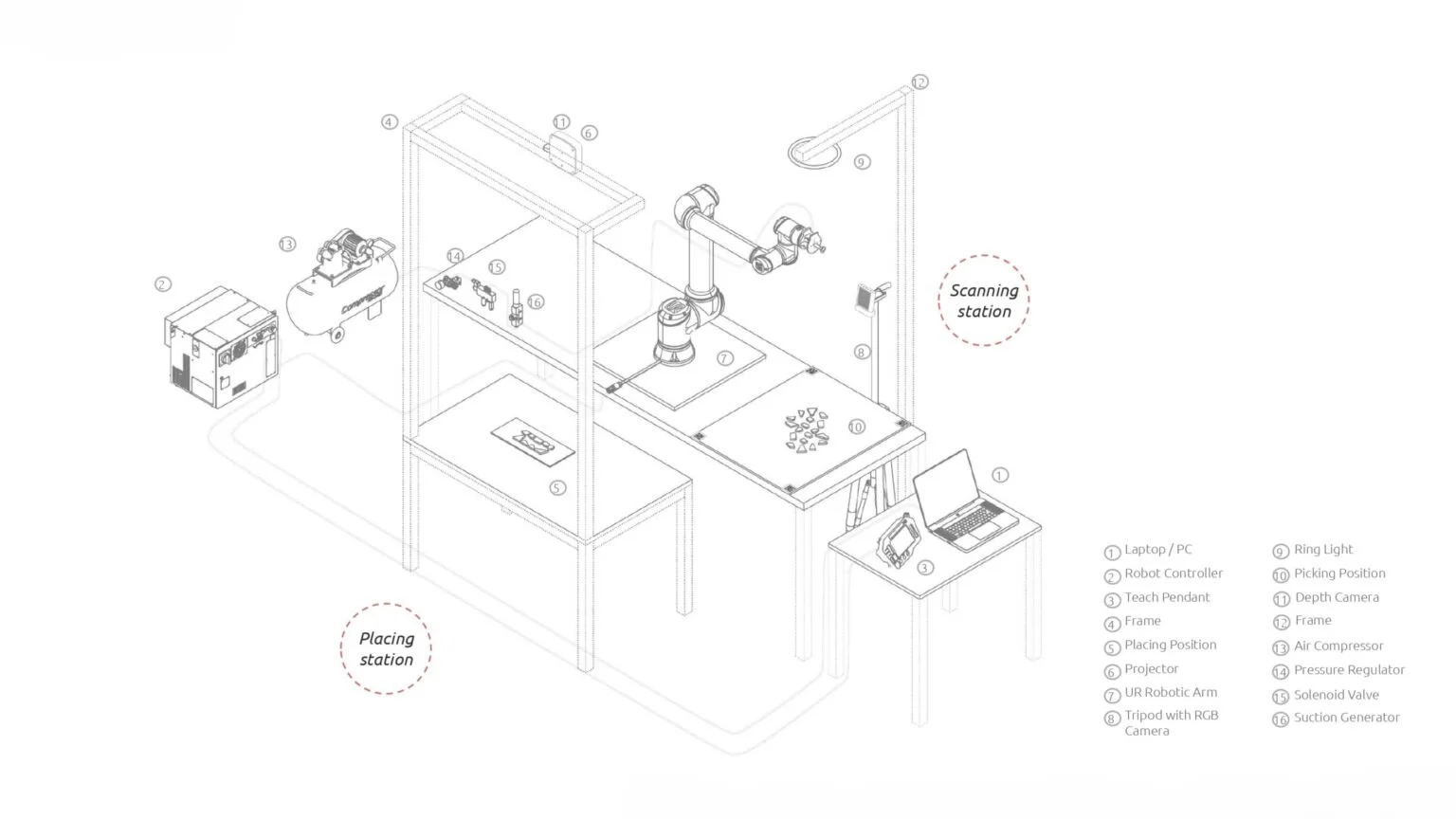
Robotic Cell
Robotic Cell – Simulation and Fabrication
Design Iterations

Results – Prototypes



Final Prototype – Design

Final Prototype – Human and Robot Collaboration
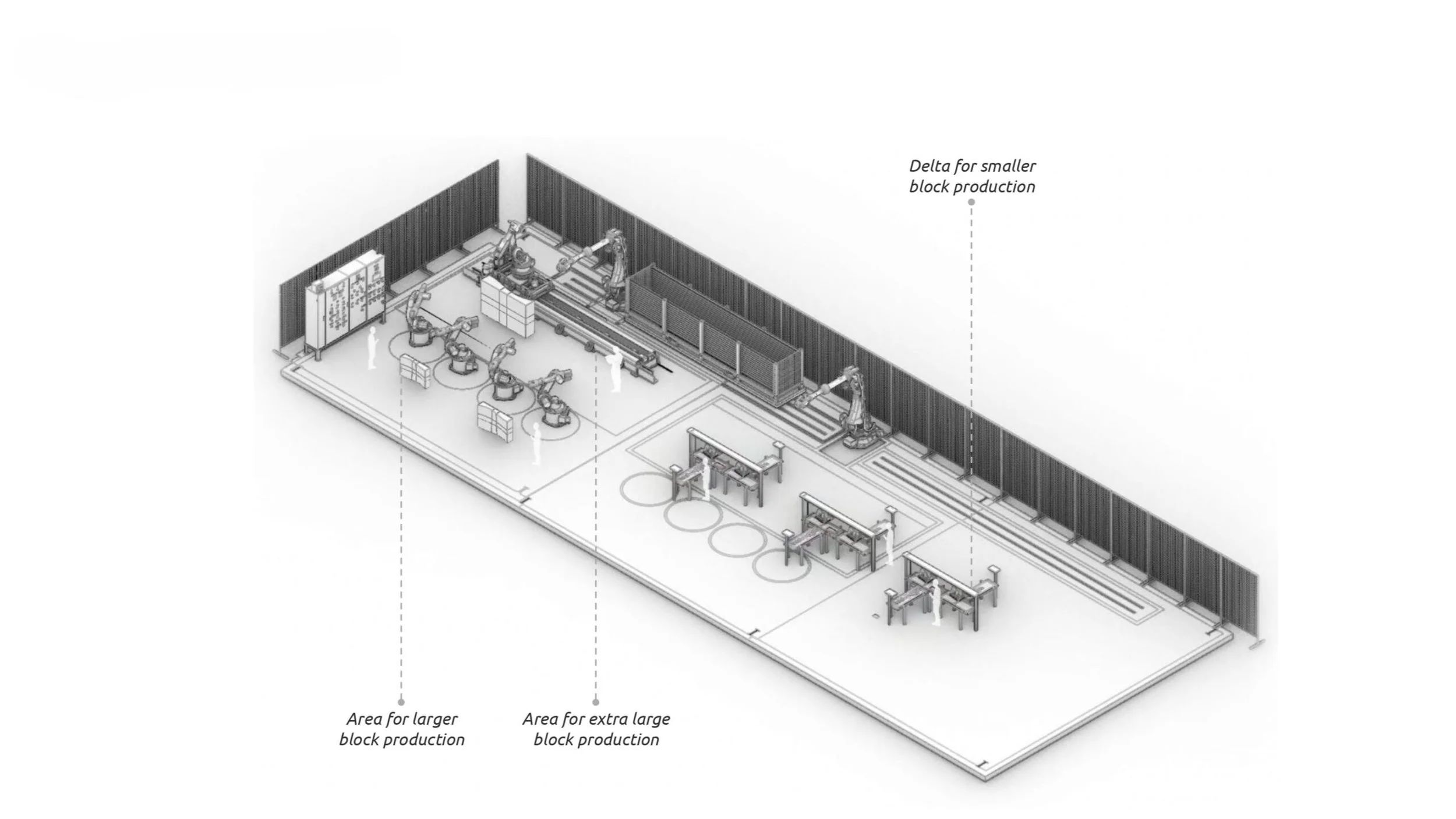
Vision – Prefabrication

Vision – On-site

Future Steps
Video

is a project of IAAC, Institute for Advanced Architecture of Catalonia developed in the Master in Robotics & Advanced Construction 2023/2024 by Students: Arun Prasad, Prottay Roy Chowdhury, Leela Vasista Monavarthy, Mahaveer Bothra, Jasper Brookes and Faculty: Alexandre Dubor, Soroush Garivani, Aldo Sollazzo, Marielena Papandreou, Daniil Koshelyuk & Vincent Huyghe. Special Thanks: FAB Team